Este projeto está a ensinar robots a levantar a mesa em restaurantes com o objetivo de desenvolver novos métodos de aprendizagem robótica com base em inteligência artificial.
Este projeto está a ensinar robots a levantar a mesa em restaurantes com o objetivo de desenvolver novos métodos de aprendizagem robótica com base em inteligência artificial.
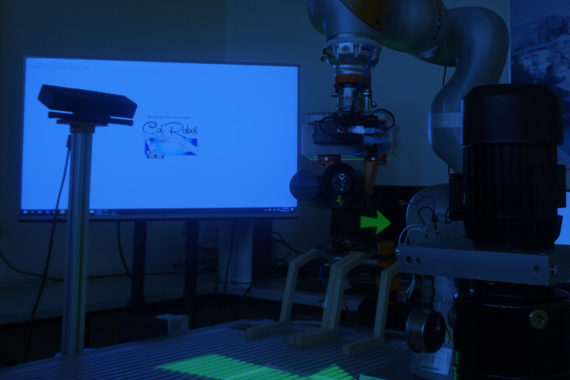
Luís Seabra Lopes, professor no Departamento de Eletrónica, Telecomunicações e Informática da Universidade de Aveiro (UA) e investigador IEETA – Instituto de Engenharia Eletrónica e Informática da Universidade de Aveiro, participa no projeto europeu RACE – Robustness by Autonomous Competence Enhancement, que está a usar robots PR2 em cenários simulados com tarefas complexas, como restaurantes ou bares.
“Nos últimos anos a minha atividade esteve muito centrada no projeto europeu RACE. Este projeto utilizou um robot PR2, um robot móvel com dois braços, e, com base nessa plataforma, demonstrámos um conjunto de capacidades bastante variadas”, acrescenta.
Como exemplo, a equipa de Luís Seabra Lopes colocou o robot a limpar a mesa de um restaurante.
Segundo um investigador esta tarefa, relativamente simples para um ser humano, envolve uma série de componentes que tornam o problema algo complexo para um robot.
“Uma das componentes deste problema é retirar todos os objetos, isto aqui é uma tarefa que é parecida para cada um dos objetos que estão na mesa. Há aqui qualquer coisa que se repete e que depende da quantidade de objetos que efetivamente lá estão mas pode haver objetos que nem sequer seja para retirar porque são objetos que fazem parte da apresentação da mesa e não são retirados”, explica.
Luís Seabra Lopes está assim a testar um sistema de aprendizagem com base na interpretação simbólica dos objetos. Desta forma, embora a função seja similar, retirar o objeto da mesa, será possível ao robot determinar qual a melhor forma de retirar cada objeto e, ao mesmo tempo, definir quais dos objetos devem ser levantados e quais devem permanecer na mesa.
“O que está aqui em causa envolve uma representação simbólica do conhecimento do robot, uma representação simbólica das tarefas, das operações que ele realiza e é esta capacidade de abstrair esta representação para se adaptar a situações não iguais mas parecidas, que estamos a estudar”, remata.
Saiba mais sobre o investigador em: Researchgate | UA
Related Episodes